一种模拟跑步机器人辗轧式的园林用小型花盆铺土装置的制作方法
1.本发明涉及园林盆栽设备技术领域,具体来说,涉及一种模拟跑步机器人辗轧式的园林用小型花盆铺土装置。
背景技术:
2.在一定的地域运用工程技术和艺术手段,通过改造地形、种植树木花草、营造建筑和布置园路等途径创作而成的美的自然环境和游憩境域,就称为园林。
3.花盆是一种花用的一种器皿,为口大底端小的倒圆台或倒棱台形状。当需要在花盆中种植花卉时,人们需要先向花盆中铺好泥土,才能进行后续的种植工作,当人们在铺泥土前,人们需要先将泥土松土,将泥土分散均匀,不会结块。人们一般都是用齿耙将泥土打散,然后用筛子在花盆顶部筛土,使得落入花盆的泥土更加松散,以便于后续的种植工作,由此进行铺土,会耗费大量的人力物力,不仅铺土时间过长,而且会弄得全身都是泥垢。
技术实现要素:
4.本发明的技术任务是针对以上不足,提供一种模拟跑步机器人辗轧式的园林用小型花盆铺土装置,来解决上述中的问题。
5.本发明的技术方案是这样实现的:
6.一种模拟跑步机器人辗轧式的园林用小型花盆铺土装置,包括箱体,所述箱体的两侧底部均设有支撑架,所述支撑架的底部均设有支撑脚,所述箱体的顶部设有进料漏斗,所述箱体的底部设有出料口,所述出料口的下方设有下料部,所述箱体内设有碾压装置,其中,两端支撑架之间的下部设有固定框,且所述固定框的两侧均通过横板与所述支撑架对应侧边下部固定连接,所述固定框内设有花盆本体。
7.采用模拟跑步机器人结构式的碾压装置来实现对泥土的碾压,防止结块的泥土直接落入到花盆内影响后续移栽工作,同时降低人为手动操作的工作劳动力及提高了工作效率,另外,采用可弯折式的下料部,通过调节管道的弯折角度来实现落料的均匀性,将碾压后的泥土在弯转活动过程中所增加的落料路径来扩大散落下去的面积,从而可均匀性的将泥土铺设在花盆内。
8.作为优选,所述花盆本体的上方设有滤板,所述滤板两侧均设有固定板二,所述固定板二且远离所述滤板的一端均设有一组支撑弹簧,其中,任意一组支撑弹簧之间均采用浮球连接,远离所述固定板二一侧所设置的支撑弹簧外端均设有固定板一,所述固定板一且远离所述支撑弹簧的一端均固定在所述支撑架相对应侧边下部,支撑弹簧受到外界力下会产生压力,促使带动滤板实现晃动,从而将滤板上的泥土实现筛选功能。
9.作为优选,所述固定板二的上方且均位于所述滤板两侧的顶部均设有挡板,所述挡板均设置为牛角结构,可通过两个挡板来对上下所落下的泥土进行遮挡,防止泥土落入到外部造成浪费。
10.作为优选,所述下料部包括第一管道,所述第一管道的上部与所述出料口螺纹固
定,所述第一管道的底部设有第二管道,所述第二管道的底部设有第三管道,所述第三管道的底部设有第四管道,所述第四管道的底部设有出料端,其中,所述第一管道与所述第二管道之间设有转接头一,所述转接头一上套设有齿轮盘一,所述齿轮盘一的表面设有与所述齿轮盘一相啮合的全齿轮一,所述全齿轮一的输入端连接有输出轴一,所述输出轴一的输入端连接电机一,所述输出轴一的表面套设有固定块一,所述固定块一固定在所述第一管道的表面相对应的端部上;所述第二管道与所述第三管道之间设有转接头二,所述转接头二上套设有齿轮盘二,所述齿轮盘二的表面设有与所述齿轮盘二相啮合的全齿轮二,所述全齿轮二的输出端连接有输出轴二,所述输出轴二的输入端连接有电机二,所述输出轴二的表面套设有固定块二,所述固定块二固定在所述第二管道的表面相对应的端部上;所述第三管道与所述第四管道之间设有转接头三,所述转接头三上套设有齿轮盘三,所述齿轮盘三的表面设有与所述齿轮盘三相啮合的全齿轮三,所述全齿轮三的输出端连接有输出轴三,所述输出轴三的输入端连接有电机三,所述输出轴三的表面套设有固定块三,所述固定块三固定在所述第三管道的表面相对应的端部上。
11.通过全齿轮带动齿轮盘旋转,促使齿轮盘一来带动相对应的管道旋转,其中第二管道、第三管道和第四管道的截面口为倾斜式的,当齿轮盘旋转时,可带动管道发生角度的改变,如第四管道在齿轮盘三的带动下发生九十度的翻转,从而增加管道内部的路径。
12.作为优选,所述第一管道、所述第二管道、所述第三管道以及所述第四管道的内壁均设有若干个凹槽,所述出料端采用若干个凹凸面组成,通过采用若干个凹凸面来组成,当泥土经过凹凸面的时候,凹凸面会对泥土进行撞击,增加了摩擦面。
13.作为优选,所述碾压装置包括固定板,所述固定板的两侧均设有支撑板,所述支撑板端部均固定在所述箱体内上部相对应端部上,所述固定板的底部一端设有支撑块,所述支撑块的底部设有凸板,所述凸板底部设有双向电机,所述双向电机位于所述固定板下方另一侧。
14.其中,所述双向电机的输出端均连接有偏心轴,所述偏心轴另一端均套设有连接板四,所述连接板四且远离所述偏心轴的一端且对应所述凸板一侧端部上均设有连接板二,其中,所述连接板二的一端均活动连接在所述凸板的侧边顶部中心处,所述连接板二另一端均设有三角连接板,所述三角连接板另两端分别设有连接板三和碾压板,其中,所述连接板三另一端均活动连接在所述连接板四的侧边中部,所述碾压板一端均活动连接有连接板一,所述连接板一另一端均活动连接在所述连接板二的侧边下部。
15.同时,所述连接板二且对应所述双向电机的一侧中部均设有与所述双向电机侧边相配合的弧形槽。
16.模拟跑步机器人结构来实现碾压功能,使得通过两个碾压板在模拟人为跑步操作对箱体内部的泥土进行碾压,从而可将结块的泥土碾碎,防止结块泥土落入到花盆内影响后续的移栽工作。
17.与现有技术相比,本发明的优点和积极效果在于:
18.1、采用模拟跑步机器人结构式的碾压装置来实现对泥土的碾压,防止结块的泥土直接落入到花盆内影响后续移栽工作,同时降低人为手动操作的工作劳动力及提高了工作效率,另外,采用可弯折式的下料部,通过调节管道的弯折角度来实现落料的均匀性,将碾压后的泥土在弯转活动过程中所增加的落料路径来扩大散落下去的面积,从而可均匀性的
将泥土铺设在花盆内。
19.2、其中,采用多个相贯通连接的管道进行连接,且管道之间均是通过转接头进行固定,通过相对应的全齿轮和齿轮盘之间的配合作用,促使不同的管道实现不同的旋转,因而可将内部的泥土在旋转过程中增加落料的路径,且同时泥土在落料过程中通过内壁上所设置的若干个凹槽面又可起到撞击效果,促使结块的泥土实现二次破碎,然后在凹凸面状的出料端作用下将其散落在下方的滤板上,通过滤板的过滤对其进行过滤,将泥土内部含有的残渣进行再次的过滤,且过滤的同时由于重量的作用,带动两侧的支撑弹簧产生晃动力,从而可方便滤板对上部的泥土实现振动筛选功能。
20.3、在两端均设置一组支撑弹簧,且两个支撑弹簧之间均是采用浮球来连接的,通过浮球的作用可增加支撑弹簧的晃动力,让滤板上的泥土可在晃动作用下将内部的泥土筛选散落下来铺满花盆本体,采用此种手法可有效增加花盆本体内部泥土的松软性,有利于后续的移栽工作。
附图说明
21.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
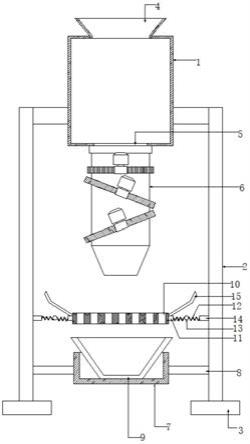
22.图1是根据本发明实施例的总结构示意图;
23.图2是根据本发明实施例的下料部使用状态图一;
24.图3是根据本发明实施例的下料部使用状态图二;
25.图4是根据本发明实施例的下料部使用状态图三;
26.图5是根据本发明实施例的管道内部结构示意图;
27.图6是根据本发明实施例的碾压装置结构示意图。
28.图中:
29.1、箱体;2、支撑架;3、支撑脚;4、进料漏斗;5、出料口;6、下料部;7、固定框;8、横板;9、花盆本体;10、滤板;11、固定板二;12、支撑弹簧;13、浮球;14、固定板一;15、挡板;16、第一管道;17、第二管道;18、第三管道;19、第四管道;20、齿轮盘一;21、全齿轮一;22、电机一;23、固定块一;24、齿轮盘二;25、全齿轮二;26、电机二;27、固定块二;28、齿轮盘三;29、全齿轮三;30、电机三;31、固定块三;32、凹槽;33、出料端;34、固定板;35、支撑板;36、支撑块;37、凸板;38、双向电机;39、偏心轴;40、连接板四;41、连接板二;42、三角连接板;43、连接板三;44、碾压板;45、连接板一;46、弧形槽。
具体实施方式
30.为了能够更清楚地理解本发明的上述目的、特征和优点,下面结合附图和实施例对本发明做进一步说明。需要说明的是,在不冲突的情况下,本申请的实施例及实施例中的特征可以相互组合。
31.下面结合附图和具体实施例对本发明作进一步说明。
32.根据本发明的实施例,提供了一种模拟跑步机器人辗轧式的园林用小型花盆铺土
装置,如图1至图6所示,其中,
33.实施例一
34.如图1中所展示的:
35.本发明提供一种模拟跑步机器人辗轧式的园林用小型花盆铺土装置适用于,其结构包括箱体1,所述箱体1的两侧底部均设有支撑架2,所述支撑架2的底部均设有支撑脚3,所述箱体1的顶部设有进料漏斗4,所述箱体1的底部设有出料口5,所述出料口5的下方设有下料部6,所述箱体1内设有碾压装置,其中,两端支撑架2之间的下部设有固定框7,且所述固定框7的两侧均通过横板8与所述支撑架2对应侧边下部固定连接,所述固定框7内设有花盆本体9。
36.另外,所述花盆本体9的上方设有滤板10,所述滤板10两侧均设有固定板二11,所述固定板二11且远离所述滤板10的一端均设有一组支撑弹簧12,其中,任意一组支撑弹簧12之间均采用浮球13连接,远离所述固定板二11一侧所设置的支撑弹簧12外端均设有固定板一14,所述固定板一14且远离所述支撑弹簧12的一端均固定在所述支撑架2相对应侧边下部,所述固定板二11的上方且均位于所述滤板10两侧的顶部均设有挡板15,所述挡板15均设置为牛角结构。
37.实施例二
38.如图1
‑
5中所展示的:
39.本发明提供一种模拟跑步机器人辗轧式的园林用小型花盆铺土装置适用于,其结构包括箱体1,所述箱体1的两侧底部均设有支撑架2,所述支撑架2的底部均设有支撑脚3,所述箱体1的顶部设有进料漏斗4,所述箱体1的底部设有出料口5,所述出料口5的下方设有下料部6,所述箱体1内设有碾压装置,其中,两端支撑架2之间的下部设有固定框7,且所述固定框7的两侧均通过横板8与所述支撑架2对应侧边下部固定连接,所述固定框7内设有花盆本体9。
40.另外,所述下料部6包括第一管道16,所述第一管道16的上部与所述出料口5螺纹固定,所述第一管道16的底部设有第二管道17,所述第二管道17的底部设有第三管道18,所述第三管道18的底部设有第四管道19,所述第四管道19的底部设有出料端33,其中,所述第一管道16与所述第二管道17之间设有转接头一,所述转接头一上套设有齿轮盘一20,所述齿轮盘一20的表面设有与所述齿轮盘一20相啮合的全齿轮一21,所述全齿轮一21的输入端连接有输出轴一,所述输出轴一的输入端连接电机一22,所述输出轴一的表面套设有固定块一23,所述固定块一23固定在所述第一管道16的表面相对应的端部上;所述第二管道17与所述第三管道18之间设有转接头二,所述转接头二上套设有齿轮盘二24,所述齿轮盘二24的表面设有与所述齿轮盘二24相啮合的全齿轮二25,所述全齿轮二25的输出端连接有输出轴二,所述输出轴二的输入端连接有电机二26,所述输出轴二的表面套设有固定块二27,所述固定块二27固定在所述第二管道17的表面相对应的端部上;所述第三管道18与所述第四管道19之间设有转接头三,所述转接头三上套设有齿轮盘三28,所述齿轮盘三28的表面设有与所述齿轮盘三28相啮合的全齿轮三29,所述全齿轮三29的输出端连接有输出轴三,所述输出轴三的输入端连接有电机三30,所述输出轴三的表面套设有固定块三31,所述固定块三31固定在所述第三管道18的表面相对应的端部上,所述第一管道16、所述第二管道17、所述第三管道18以及所述第四管道19的内壁均设有若干个凹槽32,所述出料端33采用
若干个凹凸面组成。
41.实施例三
42.如图1和图6中所展示的:
43.本发明提供一种模拟跑步机器人辗轧式的园林用小型花盆铺土装置适用于,其结构包括箱体1,所述箱体1的两侧底部均设有支撑架2,所述支撑架2的底部均设有支撑脚3,所述箱体1的顶部设有进料漏斗4,所述箱体1的底部设有出料口5,所述出料口5的下方设有下料部6,所述箱体1内设有碾压装置,其中,两端支撑架2之间的下部设有固定框7,且所述固定框7的两侧均通过横板8与所述支撑架2对应侧边下部固定连接,所述固定框7内设有花盆本体9。
44.此外,所述碾压装置包括固定板34,所述固定板34的两侧均设有支撑板35,所述支撑板35端部均固定在所述箱体1内上部相对应端部上,所述固定板34的底部一端设有支撑块36,所述支撑块36的底部设有凸板37,所述凸板37底部设有双向电机38,所述双向电机38位于所述固定板34下方另一侧,所述双向电机38的输出端均连接有偏心轴39,所述偏心轴39另一端均套设有连接板四40,所述连接板四40且远离所述偏心轴39的一端且对应所述凸板37一侧端部上均设有连接板二41,其中,所述连接板二41的一端均活动连接在所述凸板37的侧边顶部中心处,所述连接板二41另一端均设有三角连接板42,所述三角连接板42另两端分别设有连接板三43和碾压板44,其中,所述连接板三43另一端均活动连接在所述连接板四40的侧边中部,所述碾压板44一端均活动连接有连接板一45,所述连接板一45另一端均活动连接在所述连接板二41的侧边下部,所述连接板二41且对应所述双向电机38的一侧中部均设有与所述双向电机38侧边相配合的弧形槽46。
45.本实施例的详细使用方法与作用:
46.首先将花盆本体9放置在固定框7内,将泥土倒入进料漏斗4进入箱体1内部,然后驱动箱体1外部所安装的控制面板上的控制键,让控制键带动双向电机38驱动,使得双向电机38带动两端的偏心轴39旋转,让偏心轴39带动两端的连接板四40同时旋转,进而让连接板四40拉着连接板二41活动,使得连接板二41一端在凸板37侧边端部限位活动,另一端则拉着三角连接板42活动,使得三角连接板42拉着两端的连接板一45以及连接板三43活动,从而带动碾压板44实现左右运动,进而对内部的泥土进行碾压,其中出料口5上安装有阀门,可控制下料工作,当泥土碾压后进入到第一管道16中,此时,驱动电机一22、电机二26以及电机三30同时运动,让电机一22、电机二26和电机三30同时带动相对应的全齿轮旋转,进而全齿轮带动相啮合的齿轮盘转动,让齿轮盘带动相对应的管道发生角度的旋转,进而将内部的泥土在旋转状态下增加下料的路径,从而可将内部的泥土散落在滤板10上,而滤板10在受到压力下两端的支撑弹簧12则发生晃动,进而将滤板10上的泥土进行筛选,而筛选下来的细泥土则落入到花盆本体9中将泥土铺在内部,待到铺满后停止工作,将花盆本体9拿出来,最后将需要移栽的植物种植在内部完成移栽工序。
47.通过上面具体实施方式,所述技术领域的技术人员可容易的实现本发明。但是应当理解,本发明并不限于上述的具体实施方式。在公开的实施方式的基础上,所述技术领域的技术人员可任意组合不同的技术特征,从而实现不同的技术方案。
完整全部详细技术资料下载
当前第1页 1 2 3
相关技术
- 一种果树收获架的制作方法
- 一种切花月季无土栽培专业种植...
- 草莓育苗穴盘的制作方法
- 一种便携式植物标本夹的制作方...
- 一种餐厨废弃物的昆虫处理系统...
- 油橄榄缓坡种植园滴灌、喷灌复...
- 一种元胡的栽培方法与流程
- 一种红薯种植用翻土装置的制作...
- 一种红薯用施肥装置的制作方法
- 一种酿酒葡萄种植用智慧监控设...
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1