全自动喷绘放线智能机器人的制作方法
1.本实用新型涉及一种全自动喷绘放线智能机器人,属于建筑喷涂设备技术领域。
背景技术:
2.目前对于室内建筑场地的放线多为人工手动放线,但由于建筑地下室的环境的恶劣,存在蚊虫、潮湿、黑暗等危险,对工作人员进入地下室放线带来挑战,工人的劳动强度大且线可能将线放不直,由此设计了全自动喷绘放线智能机器人。
技术实现要素:
3.全自动喷绘放线智能机器人主要用于室内场地的喷绘放线,可根据用户需求画出矩形、凸字型、凹字形等形状。机器人为全自主移动划线,无需人工参与划线,用户只需按下启动按钮,选择划线模式即可启动机器人根据需求划线。可完成、定位喷线、二构墙体轮廓线、装备式机房定位线。当划线完成后机器人驶离划线区域自动停止。
4.本实用新型采用的技术方案为全自动喷绘放线智能机器人,包括测距单元、车体、喷绘放线单元;测距单元和喷绘放线单元均安装在车体上部;测距单元共有两组,且两组对称布置;所述的测距单元中,激光测距传感器6安装在传感器支撑杆3的一端,传感器支撑杆3的另一端安装在舵机2的外壳上;车体上部设有两个舵机2,每个舵机2安装在舵机固定支架1上;舵机固定支架1安装在车体上;所述的喷绘放线单元中,墨汁箱4安装在车体下部,墨汁箱4通过导管与墨汁喷头12连接,导管上水泵,水泵与控制器13连接。
5.进一步地,所述墨汁箱4和墨汁喷头12对称布置在车体两侧,以平衡该全自动喷绘放线智能机器人再喷涂工作产生的反向作用力。
6.进一步地,所述的控制器13上设有多个控制按钮,包括启停按钮8、复位按钮9和水泵控制按钮7。
7.进一步地,所述的车体的底部周向设有多个旋转云台10,旋转云台10的底部通过连接架与减速电机11相连,减速电机11能够带动轮子16转动,并且能够绕旋转云台10进行旋转。
8.进一步地,所述车体的主体结构为钢板15,测距单元和喷绘放线单元均安装在钢板15上。
9.进一步地,所述车体上还设有电源5,电源5为锂电池。
10.进一步地,所述减速电机11通过电机驱动器14与控制器13进行连接。
11.进一步地,所述墨汁喷头12上设有调整舵机,调整舵机与控制器13进行电气连接。
12.与现有技术相比较,本实用新型具有如下技术特点:
13.1.本实用新型运用激光测距,实现位置的矫正,保证了直线行走的精度,其精度在20mm以内。
14.2.本实用新型在结构上进行了创新设计,多个部件由3d打印而成,外形美观,结构轻便,占地面积较小。
15.3.产品通过单片机控制,将工程二维图转化为程序语言输入控制器,操作简便,满足智能化的需求。
16.4.产品的喷绘系统由自主创新设计,喷墨细而均匀。
附图说明
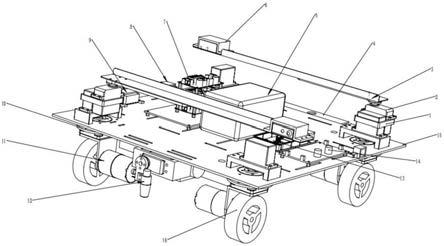
17.图1全自动划线移动机器人整体外观图
18.图2全自动划线移动机器人结构图
19.图中:1-舵机固定支架;2-舵机;3-传感器支撑杆;4-墨汁箱;5-电池;6-激光测距传感器;7-水泵控制按钮;8-启停按钮;9-复位按钮;10-旋转云台;11-减速电机;12-墨汁喷头;13-控制器;14-电机驱动器;15-钢板;16-轮子。
具体实施方式
20.下面结合附图对本实用新型对具体说明:
21.全自动喷绘放线智能机器人,包括测距单元、车体、喷绘放线单元;测距单元和喷绘放线单元均安装在车体上部;测距单元共有两组,且两组对称布置;所述的测距单元中,激光测距传感器6安装在传感器支撑杆3的一端,传感器支撑杆3的另一端安装在舵机2的外壳上;车体上部设有两个舵机2,每个舵机2安装在舵机固定支架1上;舵机固定支架1安装在车体上;所述的喷绘放线单元中,墨汁箱4安装在车体下部,墨汁箱4通过导管与墨汁喷头12连接,导管上水泵,水泵与控制器13连接。每组测距单元中的所述激光测距传感器6用以量测车体两侧的距离,传感器支撑杆3能够绕舵机2进行转动并对相应的测量位置进行调整。
22.机器人通过控制器13连接四个直流减速电机11实现直线移动,四个减速电机11上通过连接架与旋转云台10连接,能够实现车体的横向等多角度转换运动。车体的顶部对角安装两个舵机2,其上分别连接两条激光传感器支架3约为30cm,支架末端各安装一个激光测距传感器6,通过激光测出与墙面的距离与设定距离值进行比较,并将信号反馈给减速电机11纠正,实现机器人能够直线行走而不发生偏差。墨汁喷头12安装在车体左侧,通过调整舵机的控制,实现角度任意调节。喷头与水泵相连,通过控制器控制继电器的通断来实现水泵的通断,从而控制墨汁流进喷头,喷头采用可调节流量的喷头,从而调节线的粗细,喷头最前端用软笔连接,当划线工作时通过舵机控制角度与地面进行接触。
23.1.本设备为全自动移动机器人,解决了建筑领域的人工放线不统一的问题。
24.2.本设备设计的喷绘放线系统,能较好控制流量,让喷绘的线细而均匀。
25.3.喷绘装置满足不同颜色、线宽的需求。
26.4.电源5不低于1000毫安,能够满足24小时连续作业。
27.5.划线精度在20mm以内,可完成、定位喷线、二构墙体轮廓线、装备式机房定位线。
28.将机将器人搬到指定划线区域放下,按下启动按钮。机器人上电,上方的机械臂运作旋转90
°
至程序调定位置;激光传感器红色指示灯发出光线,机械臂配合激光传感器实时监测反馈机器人位置信息,调整划线路径,划线过程采用闭环控制以保证划线精度。当机器人到达划线位置并矫正后,控制器控制抽水泵工作,抽取墨汁至喷涂机构,舵机带动喷涂机构放下至工作角度,由机器人运动控制划线轨迹。划线结束后按下停止按钮,机械臂旋转归位,水泵停止工作,防止墨汁倒流,喷涂机构回到初始角度。
29.机器人机身为390x390mm的矩形钢板经过激光加工而成,整体距地面高度100mm,刚度较好,不易发生变形,能较好的保证直线行走的运动平稳性。
30.部分构件采用的技术型号及说明如下:
31.激光测距传感器的室内最长可达80米,室外最长可达50米;测量精度
±
1mm,分辨率1mm,量程80m,其主要技术参数如下:
32.技术参数:
33.1.测量范围:0.03—80米;
34.2.测量精度(标准差):
±
1.mm;
35.3.激光类型:635nm;
36.4.激光等级:ⅱ级,《1mw;
37.5.在距离m处光斑直径:6mm@10m,30mm@50m;
38.6.防护等级:ip40;
39.7.工作温度:-20~+70℃;
40.8.贮存温度:-20~+80℃;
41.9.重量:约60g
42.10.尺寸(长
×
宽
×
高):4.5
×
3.8
×
1.5cm
43.驱动电机采用直流减数电机,具有力矩大、低噪音、可靠性较高等特点,是本设备移动的主要动力源。具体参数如表2所示:
44.表2 24v直流减速电机参数
[0045][0046]
ld-27mg舵机是一款大扭矩的数字舵机,其特点:超大扭力(扭矩20kg.cm),虚位小(精加工金属齿轮),精度高、360度转动。云台上的四个舵机用于控制机器人转向和横向移动;钢板上的舵机用于控制激光传感器转向测距;侧面喷头处的舵机用于控制喷头与地面距离,只有工作时才带动喷头与地面接触,其余矫正或不工作时时向上抬起,不与地面直接接触。
[0047]
控制器13采用arduino2560控制器,控制器13是该机器人的大脑,通过它控制机器人的行走与测距,以及执行喷绘动作。当测距时,激光测距传感器将信号反馈回来,通过控制器控制舵机和减速电机纠偏,纠偏完成后再控制舵机带动喷头工作,具体参数如表3。
[0048]
表3控制器模块参数
[0049]
[0050][0051]
本实用新型装置的操作流程及步骤如下:
[0052]
s1将机器人搬到指定划线区域放下;
[0053]
s2按下启动按钮;
[0054]
1)机器人上电,上方的机械臂运作旋转90
°
至程序调定位置;激光传感器有红色指示灯发出光线,机械臂配合激光传感器实时监测反馈机器人位置信息,调整划线路径,划线过程采用闭环控制以保证划线精度。
[0055]
2)机器人到达划线位置,控制器控制水泵工作,水泵抽取墨汁至墨汁喷头,舵机带动墨汁喷头放下至工作角度,由机器人运动控制划线轨迹。
[0056]
s3划线结束后按下停止按钮;
[0057]
机械臂旋转归位;水泵停止工作,防止墨汁倒流;喷绘放线单元回到初始位置。
完整全部详细技术资料下载
当前第1页 1 2
相关技术
- 一种一次成型切桑机的制作方法
- 一种口罩生产用抗菌面料裁切装...
- 一种编织袋生产用裁边机废料收...
- 一种划线平台的制作方法
- 一种多用途夹爪的制作方法
- 一种便于拆卸的汽车门拉手面盖...
- 一种伺服迷你单臂横走机的制作...
- 一种四防汽车钥匙的制作方法
- 一种多层密封的防泄漏核医用手...
- 用于棱镜制备的多功能夹具装置...
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1